1. Introducción
El proyecto BlueCar es una iniciativa del Laboratorio de Electromovilidad Inteligente (LEMI) del Tecnológico de Monterrey, Campus Ciudad de México. El objetivo es desarrollar un kit de aprendizaje y desarrollo práctico para estudiantes de ingeniería mecatrónica, robótica y electrónica.

4. Alcance
El proyecto BlueCar tiene como objetivo ser replicable en diferentes planteles del Tecnológico de Monterrey y otras instituciones educativas, facilitando el aprendizaje práctico en ingeniería.

10. ROS2
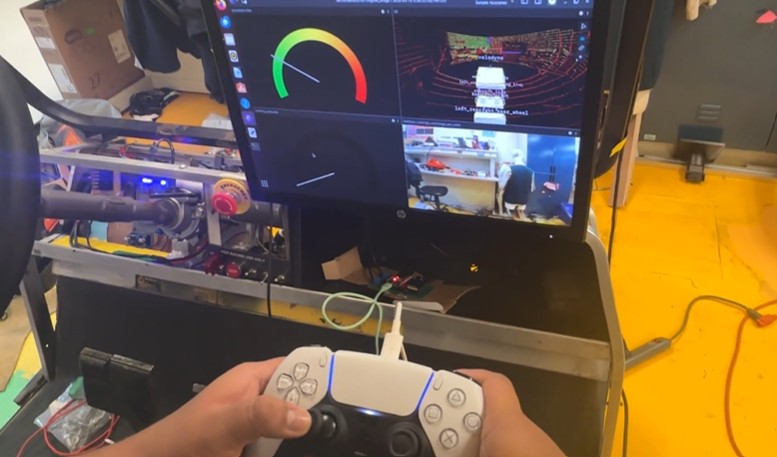
El proyecto BlueCar utiliza ROS2 (Robot Operating System) para la comunicación y el control. ROS2 permite la integración de diversos sensores y actuadores, facilitando el desarrollo de algoritmos de navegación autónoma y visión por computadora.
11. Computadora
Se utiliza una laptop Gigabyte con un procesador Intel i7, una tarjeta gráfica NVIDIA RTX 3070 Ti y 16 GB de RAM. Esta configuración asegura un rendimiento óptimo para el procesamiento de datos en tiempo real y la ejecución de algoritmos de visión y control.
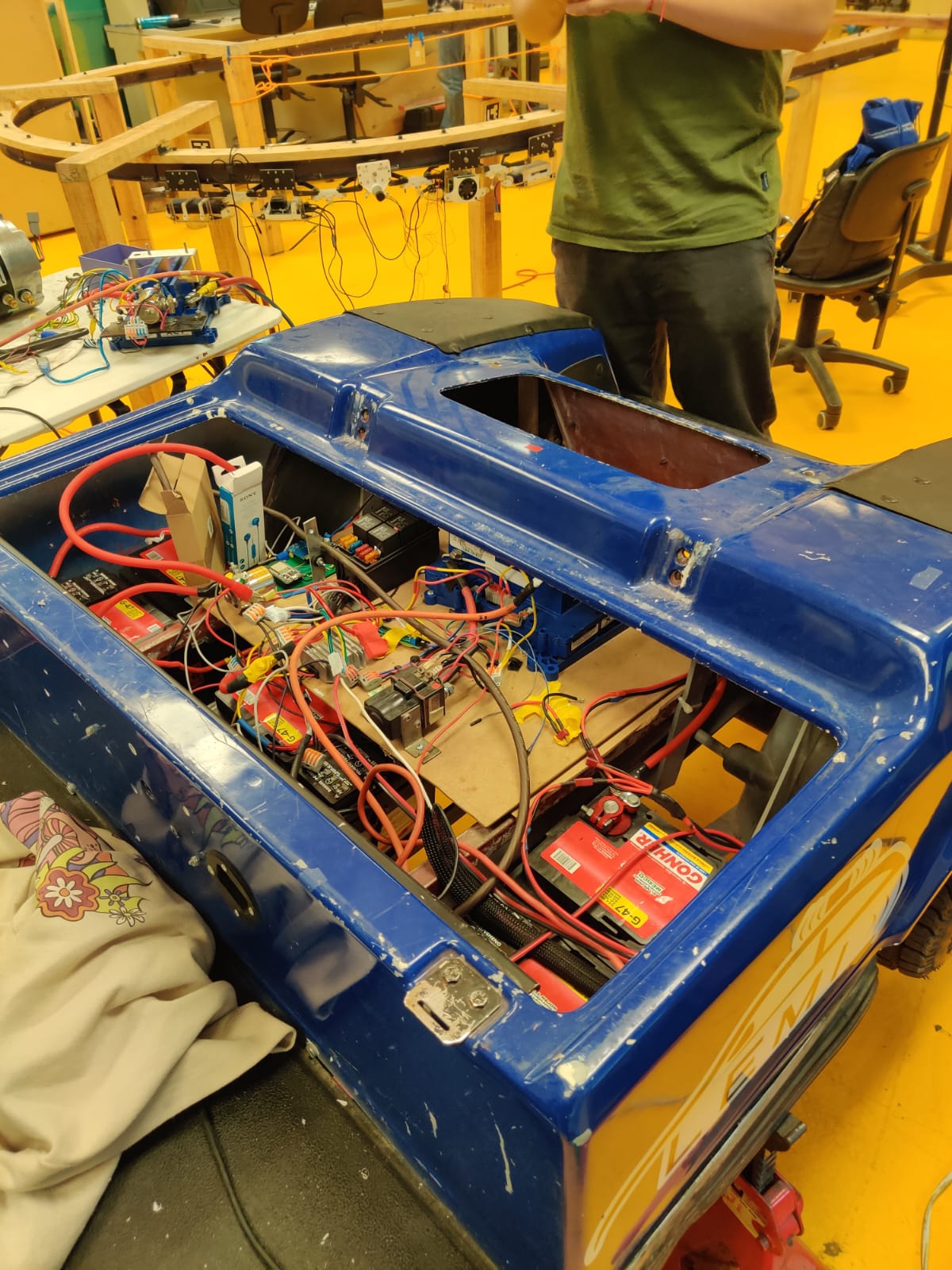
12. Comunicación CAN
La comunicación interna del vehículo se realiza mediante el bus CAN (Controller Area Network). Este sistema permite la transmisión eficiente y fiable de datos entre los diferentes componentes del vehículo, como los sensores, actuadores y la unidad de control central.
13. Propulsión
El sistema de propulsión del BlueCar está compuesto por un motor eléctrico de 36-48V, capaz de entregar entre 8 y 11.4 hp. El controlador Alltrax de 300A gestiona la potencia del motor, permitiendo una aceleración máxima de 30 km/h.
14. Dirección
La dirección del vehículo se controla mediante un sistema de actuadores que aseguran un error máximo de 1°, con un desplazamiento de 66° en 1.93 segundos, logrando una confiabilidad del 100%.